True Position Robots
Automated Drilling and Inspection (ADI)
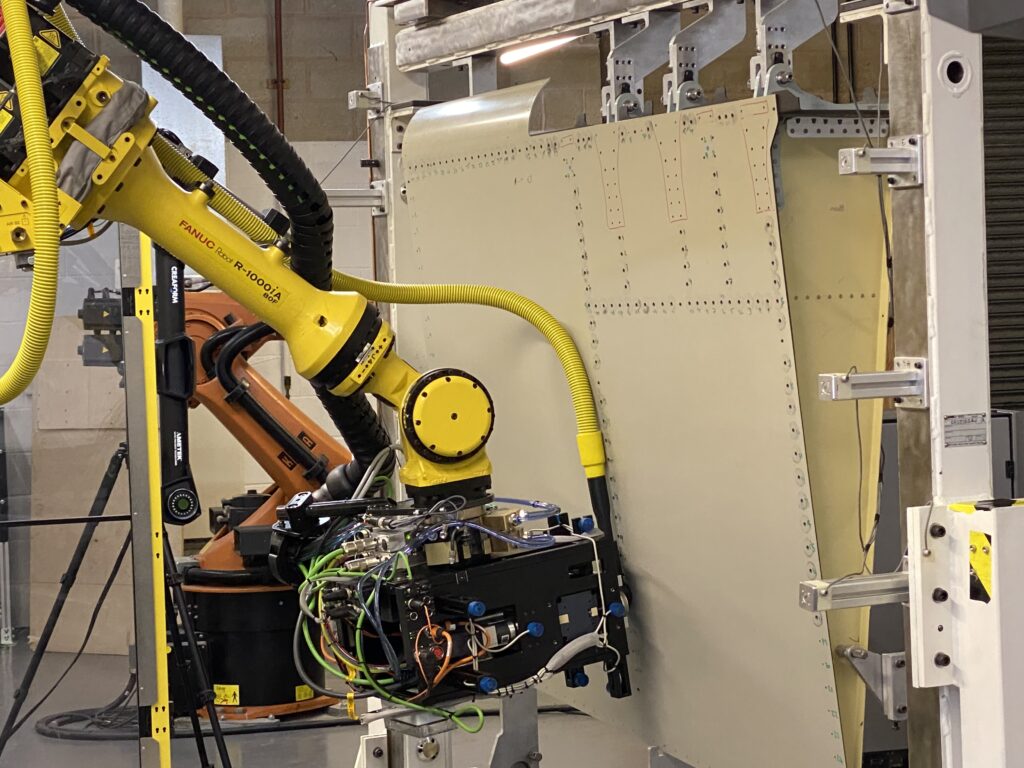
The Automated Drilling and Inspection (ADI) project set out to robotically countersink drill, and inspect an aerostructure at a target price and accuracy with no manual adjustment on the shop floor. All programs were created and driven directly from the digital thread delivering a highly automated process.
The project found there is no technical barrier from the robot intelligence and high accuracy control, to making commercial aerostructures using this method. The ADI process delivered below the capital price value set for customer return on investment.
Industrial research led to a change in the robot programming architecture, where the correct part reference frames were applied to the offline programs. The patented technology for drilling clamp-up and metrology guidance of robots were matured to TRL6, including a new method for managing robot compliance opening up the potential for lower payload, lower cost, lower energy robot arms.
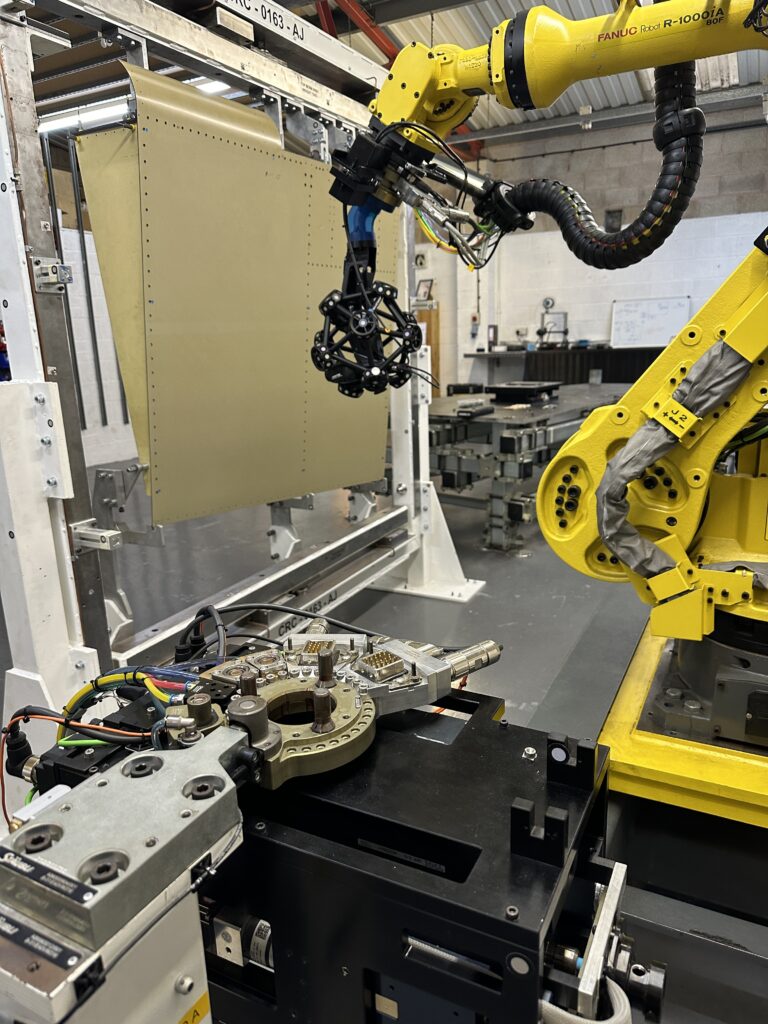
Full Geometric Dimensioning and Tolerancing was applied to the assembly, based the Product Manufacturing Information (PMI) data. All tolerances were successfully met, with countersink CpK of >4 and True Position <0.15 mm with 99.7% confidence. Volumetric accuracy was independently verified using a tetrahedron gauge, where each of the six lengths was calibrated to a micron.
The project involved creating a neutral demonstrator to show the full workflow from concept design, through manufacturing, and inspection with the results published back to the team for learning as well as conformance. A Cost Based Analysis showed the payback saving fully using the PLM on one side of the wing box, was larger than the capital value of either the developed automated drilling tool or the inspection robot tool.
During the project, new methods were developed to create a high accuracy optical “matrix”, within which all the robotic activities were managed. For the drilling, both the true position of the hole, and the feature of size (countersink depth and diameter) were developed based on pre-project patents from True Position Robotics. This was achieved with a drill which is 5x->10x lighter than current industry norms reducing capital costs in robot as well as the drill tool itself. This also resulted in significantly lower power consumption while all holes being drilled “right-first-time” direct from the digital thread resulted in no waste.